Steps of 40 nm in X, Y, and 20 nm in Z ensure that the H-840.G2IHP meets the highest demands of alignment and positioning applications in production and measuring technology. As with the entire H-840 hexapod series, the design and layout is robust and provides long travel ranges for more task flexibility. A measurement report on the step size is included in each single shipment.
Further models, e.g., with absolute encoder or for high dynamics, are listed in the datasheet for the H-840.
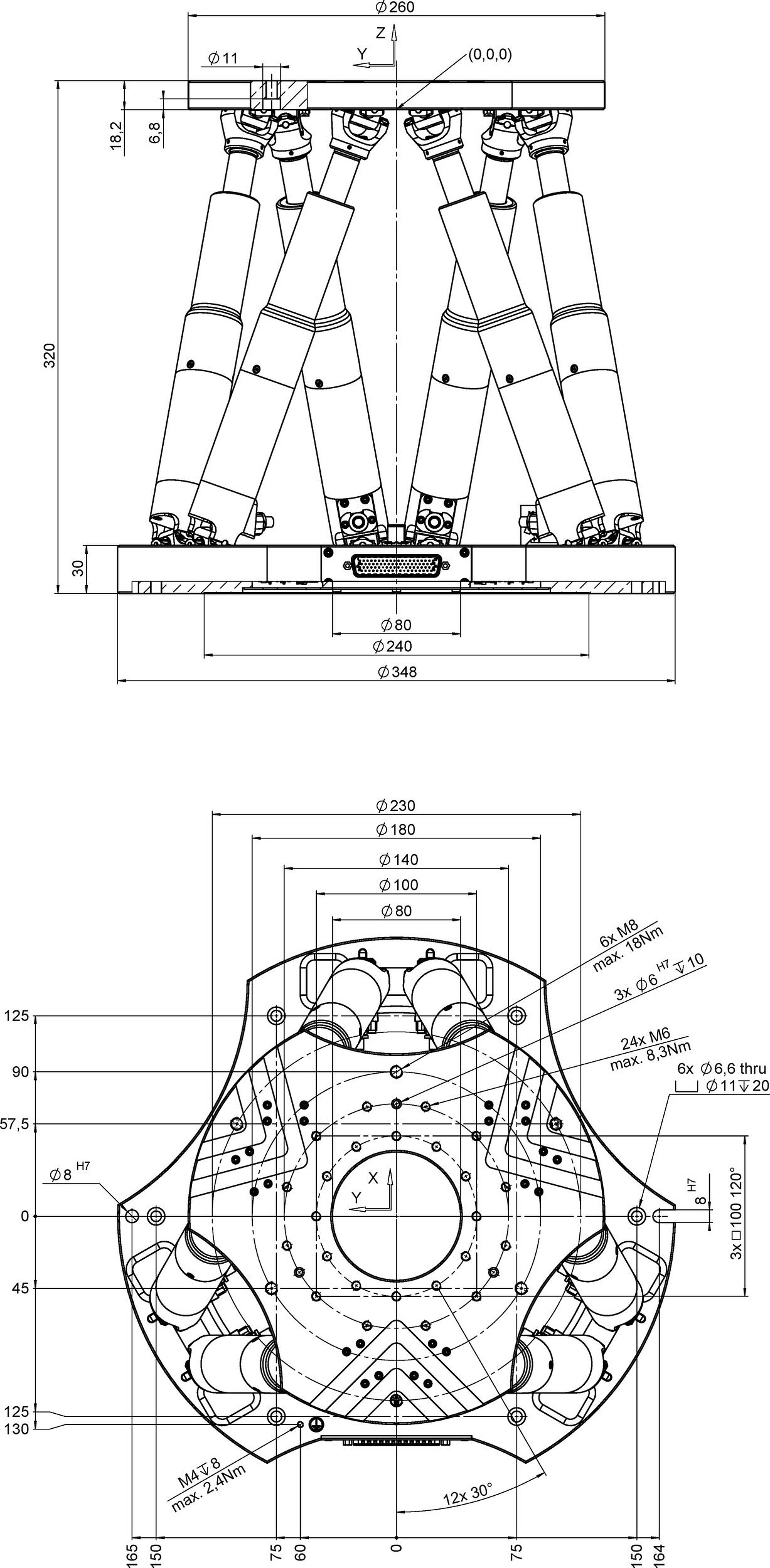
The parallel-kinematic design for 6 degrees of freedom makes it significantly more compact and stiffer than comparable serial kinematic systems. The advantages over serial, i.e., stacked systems, are mainly the much better path accuracy and repeatability. In addition, the moved mass is lower and allows improved dynamics which is the same for all motion axes. Cable management is not a problem because cables are not moved.
Use of BLDC motors
Brushless DC motors are particularly suitable for high rotational speeds. They can be controlled very accurately and ensure high precision. Because they dispense with sliding contacts, they run smoothly, are wear-free and therefore achieve a long lifetime.
PIVirtualMove
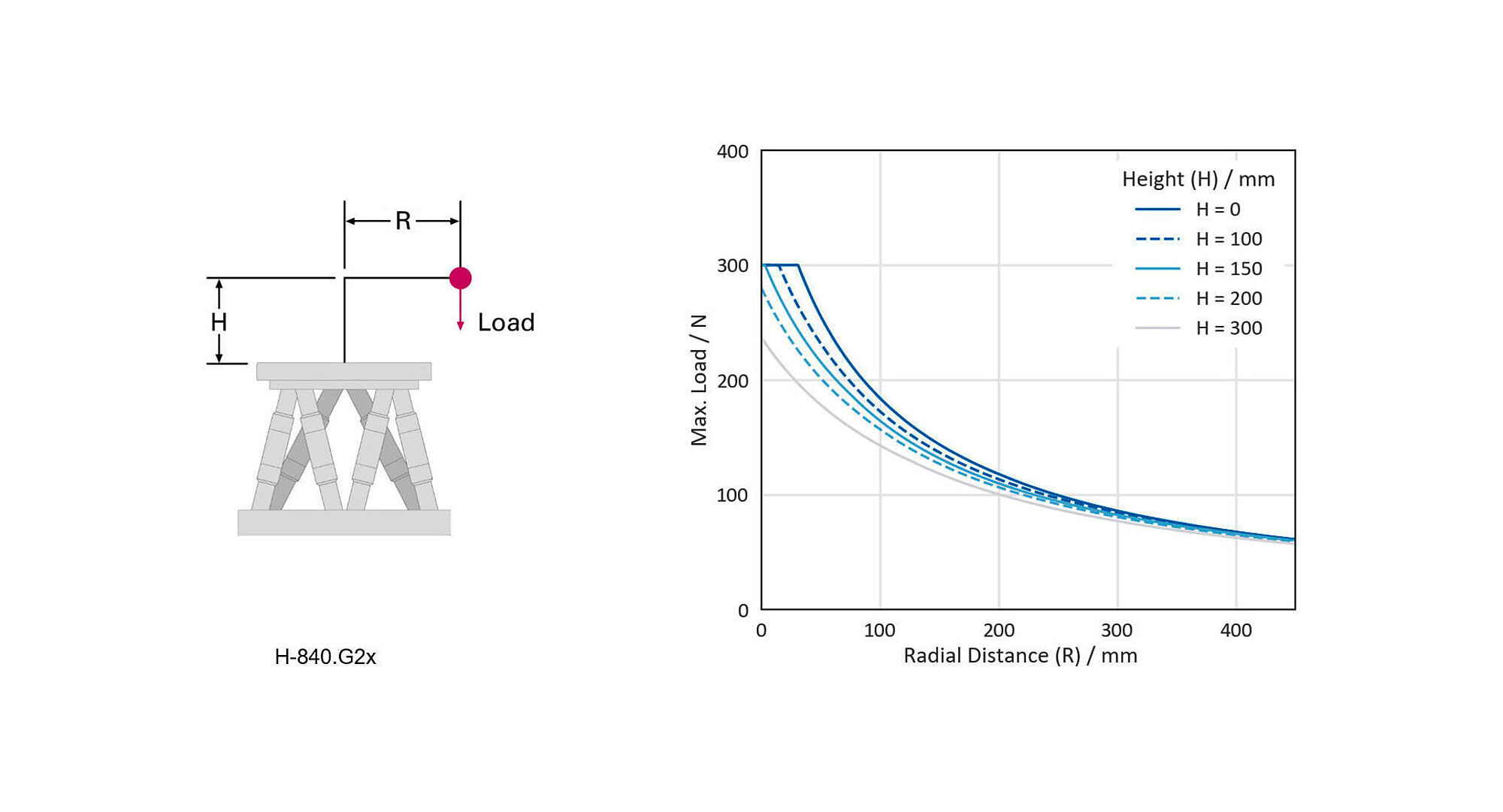
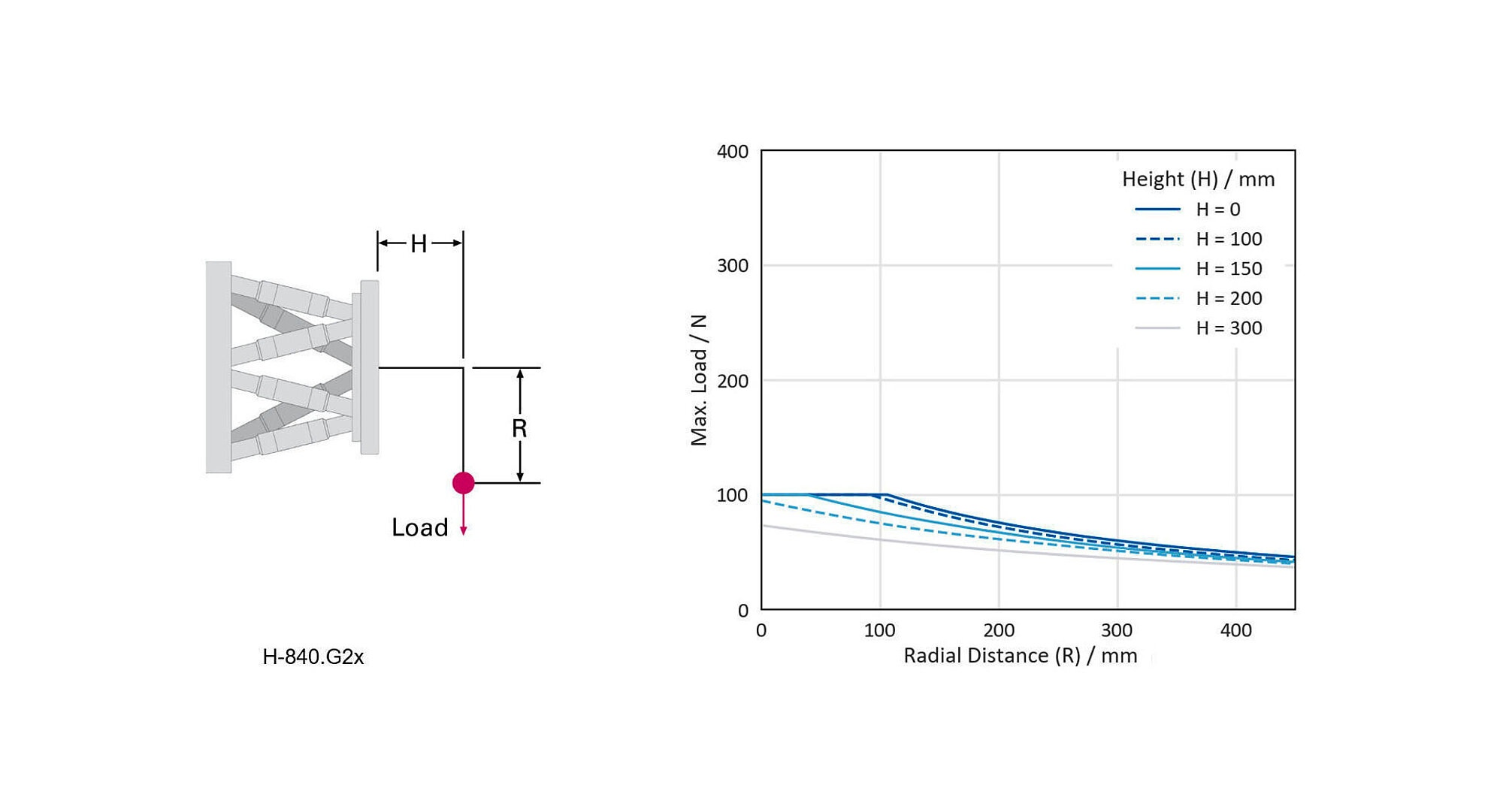
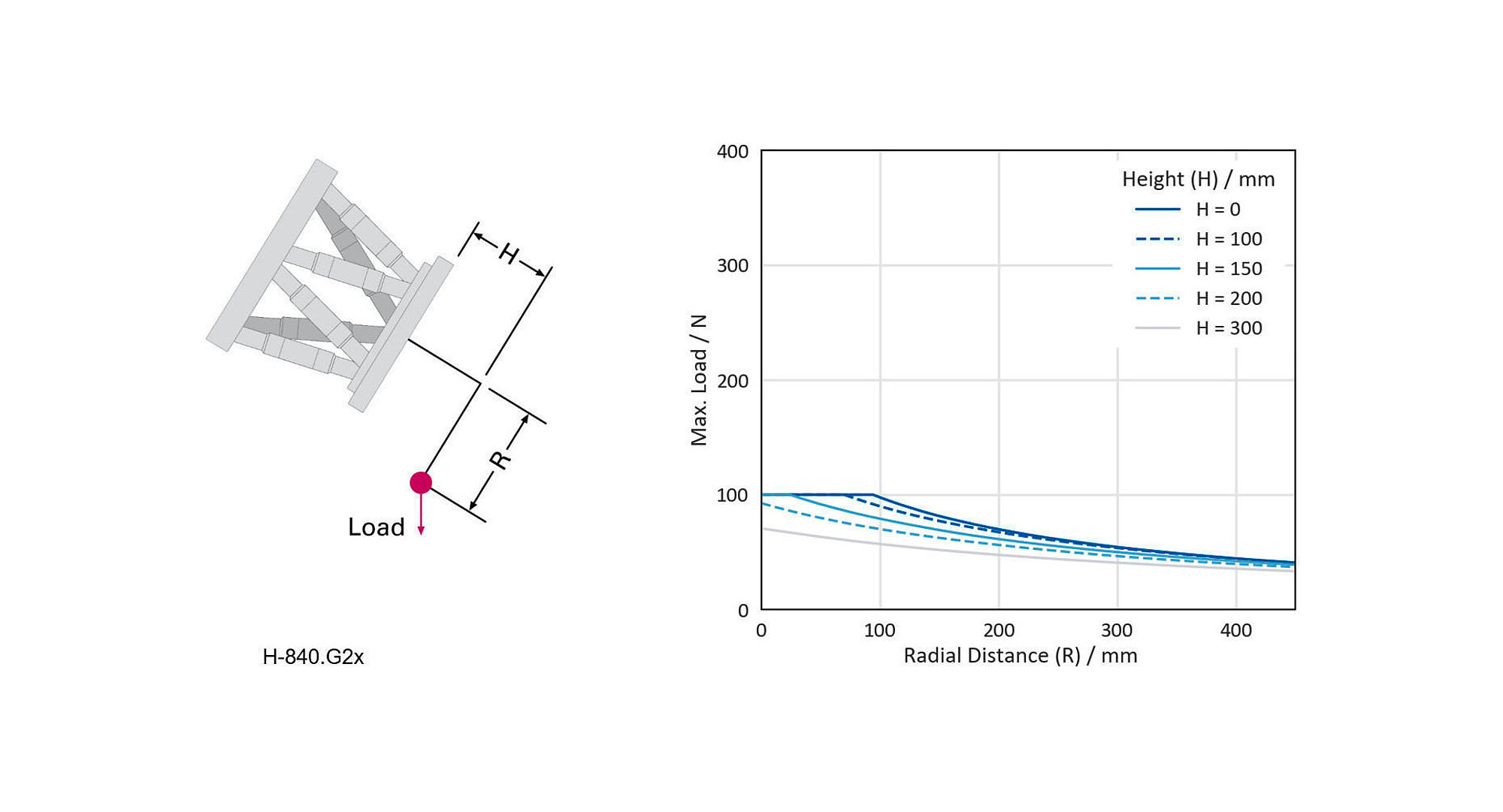
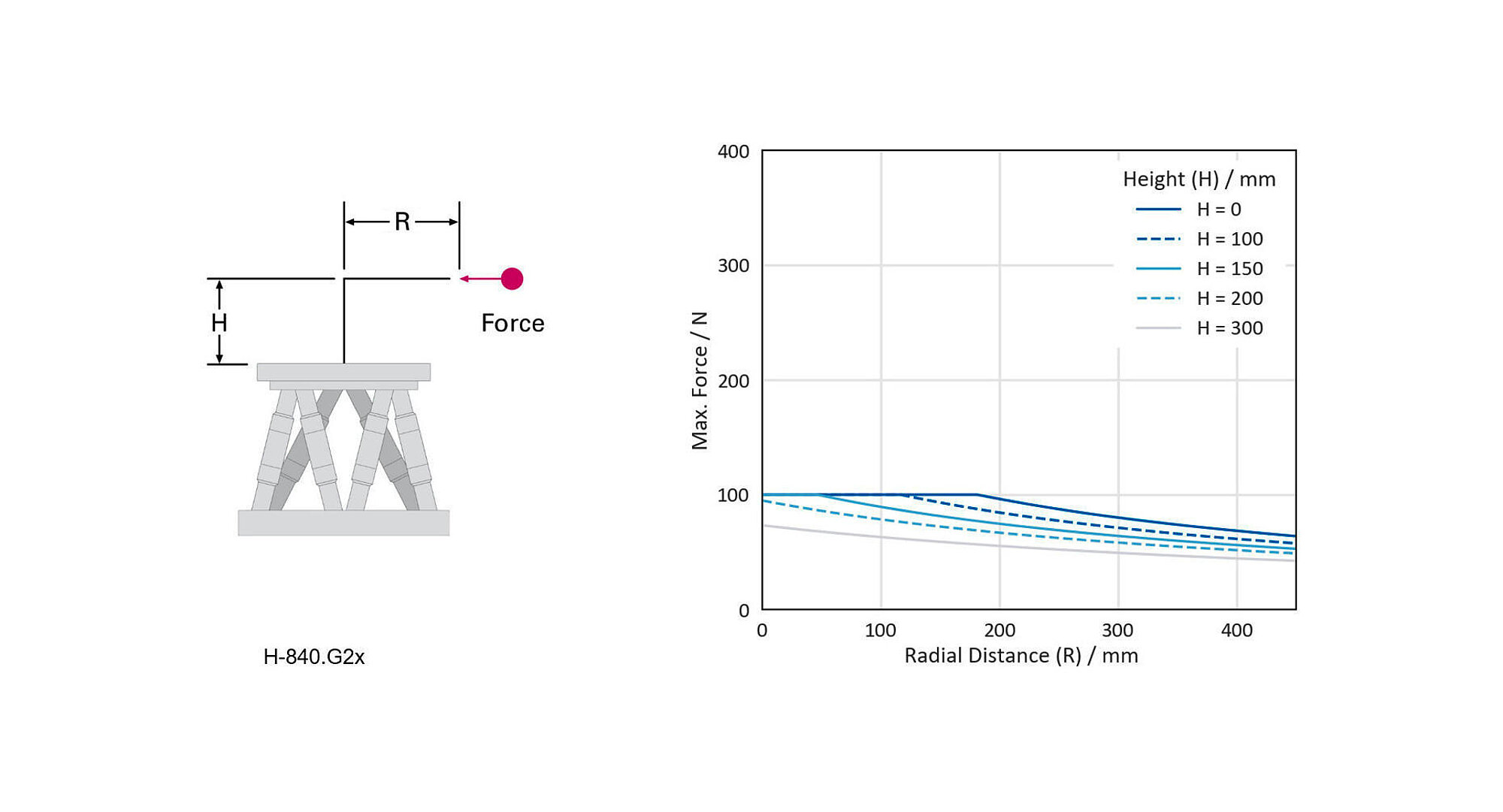
The simulation software simulates the limits of the workspace and payload of a hexapod. Therefore, even before purchasing, you can check whether a particular hexapod model can handle the loads, forces, and torques occurring in an application. For this purpose, the simulation tool takes the position and motion of the hexapod as well as the pivot point and several reference coordinate systems into account.
Application fields
Industry and research. For tool inspection, life science, micromanufacturing, micromanipulation, industrial alignment systems. For assembly, alignment, and inspection of optical components.